�
4WPi - Manuale utente
Prodotto fornito in Kit di montagio, non pu� essere utilizzato da persone inferiori ai 14 anni di et�.

Lo chassis
Come primo step, andremo ad assemblare lo chassis.
Questa parte non verr� trattata poich� � presente nella busta una dettagliata de-scrizione per l'assemblaggio
(la parte superiore dello chassis andr� avvitata per ultima altrimenti non avremo modo di posizionare Arduino e gli altri accessori).
Aggiungete i distanziatori in nylon, 2 quantit� per ogni lato.
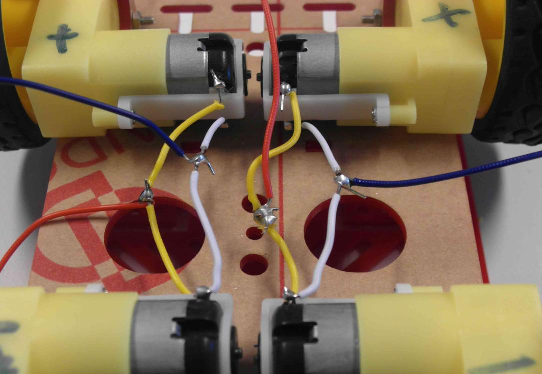
I motori
In questo step procederemo con la saldatura dei motori. � da considerare la parte pi� "complessa" della guida dato che si andr� a determinare il movimento totale del nostro robot.
Innanzitutto bisogna identificare il senso di rotazione dei motori (ci� andr� a determinare la parte anteriore e posteriore dello chassis). Questo servir� a noi per avere maggiore chiarezza sulla saldatura che andremo ad effettuare fra poco. Se non avete un'alimentatore regolabile in casa, potete utilizzare l'uscita re-golata di Arduino (5V). Quindi collegate 2 ponticelli a 5V e GND di Arduino e appoggiarli sui poli dei motori tenendo d'occhio la rotazione di quest'ultimo.
NB: (questo procedimento va fatto per tutti e 4 i motori).
Li contrassegneremo con "+" o "-".
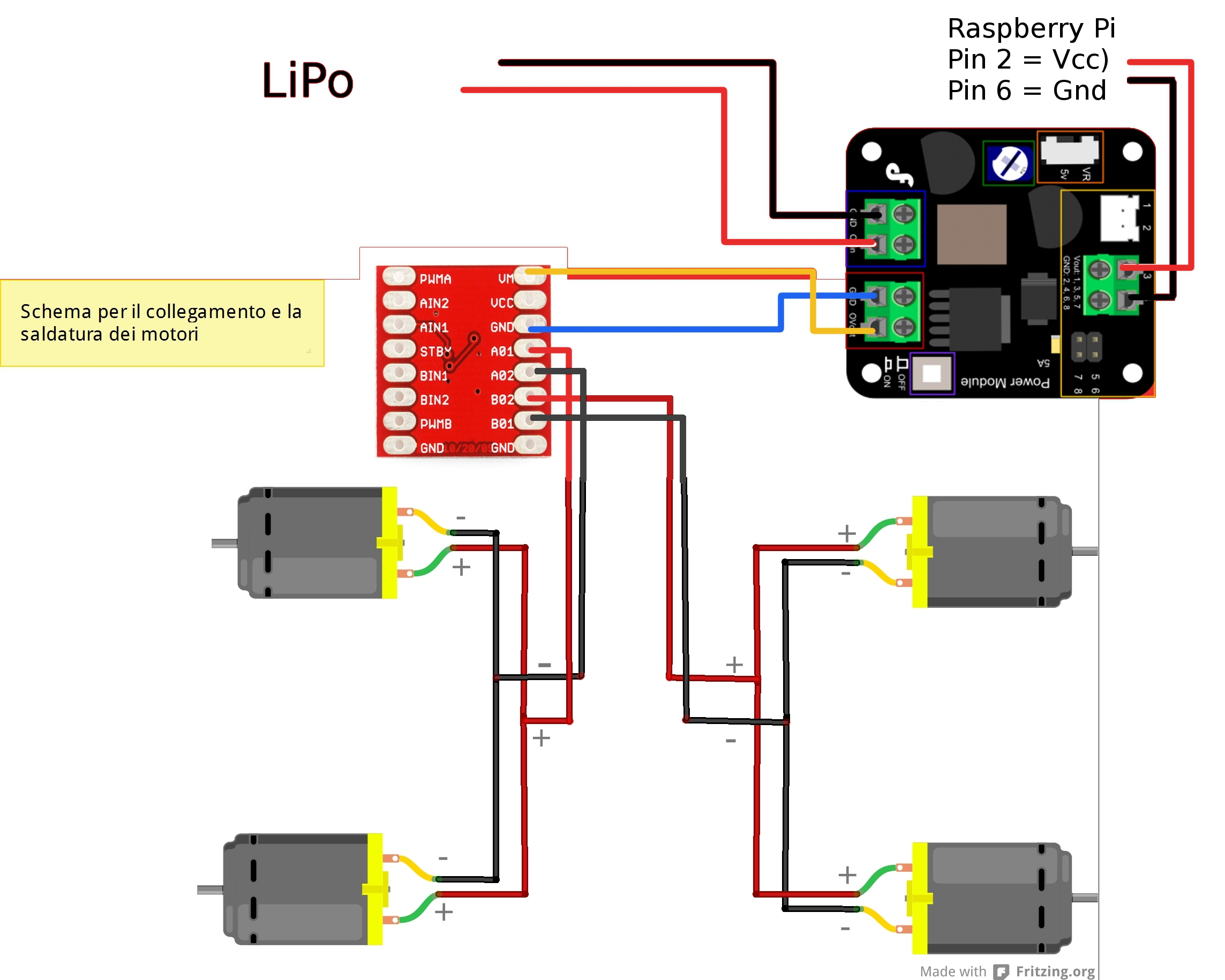
Ecco le fasi della saldatura dei motori:
Ora colleghiamo tutto cio che riguarda il controllo motori.
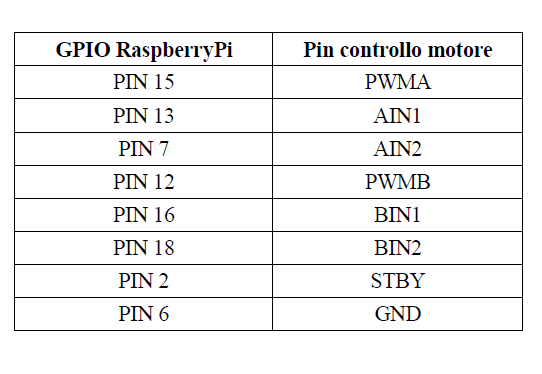
Cablaggio GPIO
Prima di alimentare la Raspberry controllare il corretto collegamento tra il GPIO e il controllo motore.
Per il corretto funzionamento del dispositivo assicurasi che I collegamenti siano come quelli riportati nella tabella sottostante :
Fare riferimento alla figura sottostante per controllare il corretto cablaggio tra controllo motore e GPIO:
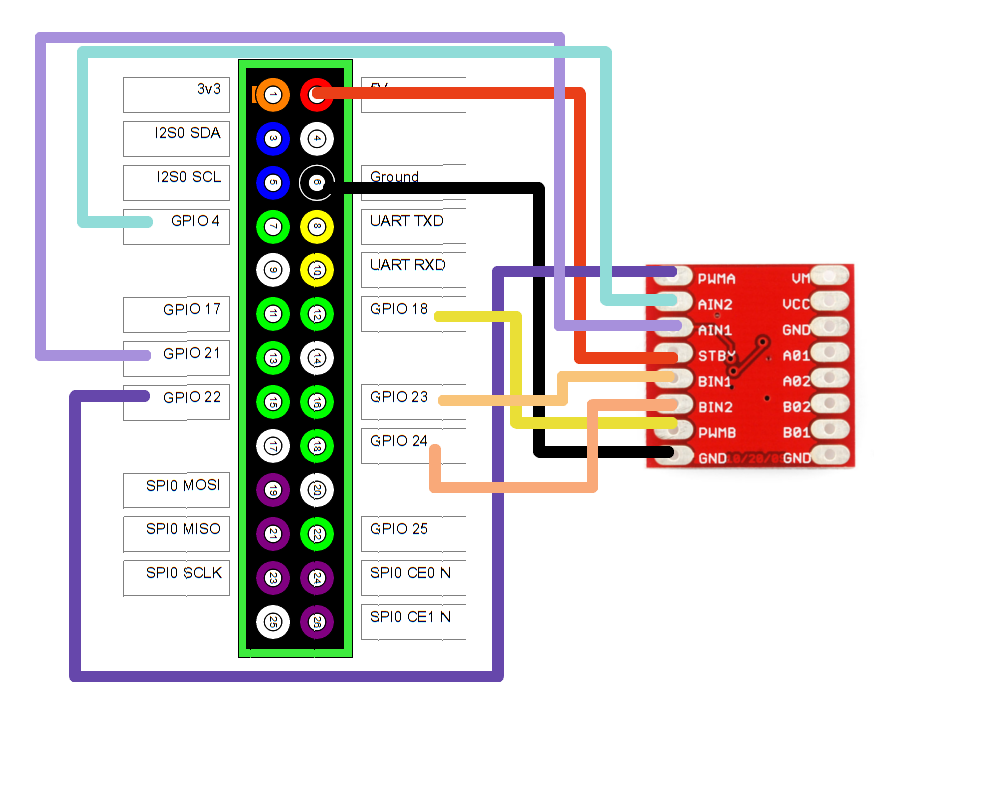
N.B. Tutti I collegamenti provenienti dalla GPIO vanno sullo stesso lato del controllore.
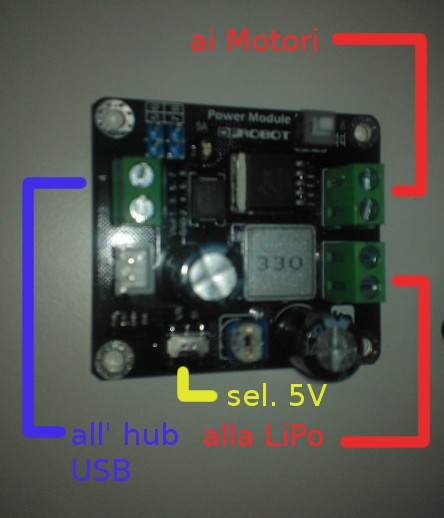
Cablaggio Convertitore
Collegare i poli della LiPo ai morsetti Vin e Gnd
Collegare VMM e GND all' OVout e Gnd , del convertitore di tensione, da questi terminali si preleva la stessa tensione della LiPo.
Collegare l'alimentazione della Raspberry (pin 2 Vcc, pin 6 GND) all'uscita 5v del modulo di alimentazione.
Si faccia attenzione a selezionare i 5V in uscita o si rischia di la Raspberry.
La versione senza HUB prevede che i collegamenti siano indirizzati alla Ra-spberry.
Una volta sinceratisi di tutti I collegamenti accendere il convertitore e collegare la Raspberry attraverso i pin 2(Vcc) e 6(GND) all'uscita 5V dello stesso, colle-gare il dongle WiFi e la telecamera (USB normale).
Prima configurazione Wifi e web Controller
Collegare un cavo LAN proveniente dal proprio router, alla porta della Ra-spberry .
Attraverso un browser, collegarsi alla pagina html del router, normalmente 192.168.1.1, e verificare l'indirizzo IP assunto dalla Raspberry (ad esempio 192.168.1.xx)
Una volta verificato l'IP, sempre dal browser, digitare l'indirizzo.
Se l'indirizzo � giusto, si aprir� una pagina che richiede SSID e password della rete.
Inseriti I dati premere il bottone e attendere qualche istante mentre la Ra-spberry configura la connessione Wlan.
A questo punto, sulla pagina del router, dovrebbe comparire una nuovo client wifi sempre chiamato Raspberry, questo � l'indirizzo del wifi.
Copiare questo indirizzo e scollegare il cavo LAN dall Raspberry.
Per utilizzare la web application fornita di base, sul router digitare:
indirizzoIPdelWIFI/htmlview/viewer.php
E si aprir� la seguente pagina:

Se il video non � disponibile, assicurarsi che la luce della telecamera � accesa, segno che il web server per lo streaming video si � avviato correttamente, in caso contrario controllare la connessione all'hub della telecamera.
Per muovere il 4WPi premere i tasti a lato, i blu permettono un movimento controllato e preciso, invece i rossi mandano i motori a massima potenza.
�


orario continuato
dal lunedì al venerdì
10:00-18:00

(0039) 06 76971136
ATTENZIONE !!!
La nostra sede
NON è aperta al pubblico!
Riceviamo solo per appuntamento.