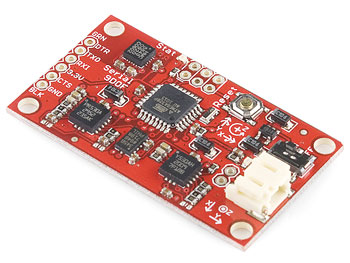
Il 9DOF Razor IMU è un misuratore inerziale dotato di un giroscopio monoassiale LY530AL,
un giroscopio a due assi LPR530AL,
un accelerometro a tre assi ADXL345 e un magnetometro a tre assi HMC5843.
Le uscite di tutti i sensori vengono elaborate da un microcontrollore Atmega328 (a bordo) e inviate serialmente in uscita.
La scheda viene fornita programmata con il bootloader Arduino 8 MHz e un firmware di esempio per testare le uscite di tutti i sensori.
Basta collegare alla porta seriale i pin TX e RX con un convertitore USB-seriale a 3,3V,
aprire un programma tipo HyperTerminal a 38.400 bps e un menu vi guider attraverso il test dei sensori.
È possibile utilizzare l'IDE di Arduino per programmare il proprio codice.
Grazie al lavoro di Jordi Munoz e tanti altri, il 9DOF Razor IMU può essere un sistema di riferimento di rotta e assetto.
Ideale come potente sistema di controllo per gli UAV,
per veicoli autonomi e per sistemi di stabilizzazione delle immagini.
I pin di uscita corrispondono a quelli del convertitore USB-seriale 7300-FTDI5V (Convertitore USB-seriale 3,3V e 5V),
permettendo di collegare facilmente la scheda alla porta USB di un computer.
CARATTERISTICHE TECNICHE
- La scheda dispone di:
- giroscopio monoassiale LY530AL - 300°/s
- giroscopio a due assi LPR530AL - 300°/s
- accelerometro a tre assi ADXL345 - 13-bit risoluzione, 16g
- magnetometro digitale HMC5843 - tre assi
- Le uscite di tutti i sensori vengono elaborate da un microcontrollore Atmega328 (a bordo) e inviate serialmente in uscita.
- La funzione Autorun (attivabile premendo 'Ctrl-z') ed il menu di aiuto sono integrati nel firmware di esempio
- Alimentazione: da 3,5 a 16 Vdc
- Interruttore ON-OFF e pulsante di reset
- Dimensioni: 49,53 x 27,94 mm
DOCUMENTAZIONE E LINK UTILI