Overview
Note: A new manufacturer (Redshift Labs) has taken over making and supporting the UM7. They have released new versions of the UM7 and UM7-LT that should be functionally equivalent to the previous versions, though some of the components have been updated to replace discontinued parts and the new UM7-LT now ships with conformal coating. Due to these changes, we are selling the new UM7s under new product numbers.
The UM7 orientation sensor is a third-generation Attitude and Heading Reference System (AHRS) from CH Robotics that produces attitude and heading estimates from triaxial accelerometer, rate gyro, and magnetometer data. Unlike a typical inertial measurement unit (IMU), which only provides raw sensor readings, the UM7 features an onboard microcontroller that combines sensor data using a sophisticated Extended Kalman Filter (EKF) to generate orientation estimates 500 times a second.
Two versions of the UM7 are available: the UM7 orientation sensor, which includes an enclosure, and the UM7-LT, which does not. The two versions are functionally equivalent, and both include a cable (even though it is only shown in one of the two pictures below).
 | UM7 orientation sensor. |
|---|
|
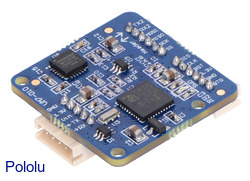 | UM7-LT orientation sensor. |
|---|
|
The UM7 features a number of improvements over its predecessor, the UM6, including higher gyro bias stability and lower noise, a new communication architecture for improved flexibility, optional NMEA packet transmission, UTC time-synchronization with external GPS, and support for third-order temperature compensation on all sensors. It takes advantage of newer MEMS (micro-electro-mechanical systems) technology that allows it to offer better performance at a lower price.
Connections for power and TTL serial communication can be made to the UM7 through a polarized five-pin male connector on one side, which mates with an included cable assembly. A pair of six-pin expansion headers on the other side of the board provide additional connectivity options, including an alternative SPI interface and a secondary serial interface that can be connected to an external GPS module (like our LS20031 GPS receiver). Additional cable assemblies for the expansion headers are not included.
You can use a general-purpose USB-to-TTL-serial adapter, such as our CP2104 carrier, to connect the UM7 to your computer. You can then use the CHR Serial Interface (available in the #8220;Resources#8221; tab) to configure the sensor, and view and log data in real-time.
Details for item #2741
 | UM7 orientation sensor with included cable and U.S. quarter for size reference. |
|---|
|
 | UM7 orientation sensor, bottom view showing optional expansion headers. |
|---|
|
Product Comparison
We carry several inertial measurement and orientation sensors. The table below compares their capabilities:
Features
Sensors and processing
- Excellent gyro bias stability over temperature
- Adjustable low-pass filter and EKF settings provide customizable performance for various applications
- States and sensor data synchronized to GPS position and velocity using optional external GPS module
- Allows for alignment calibration and third-order bias and scale factor temperature compensation for accelerometers, gyros, and magnetometer
- Magnetometer soft and hard-iron calibration can be performed through the CHR serial interface software
Communication
 |
CHR Serial Interface. |
|---|
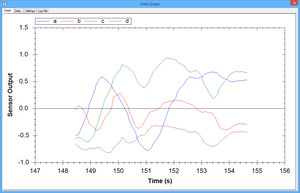 |
Graph of quaternions displayed by the CHR Serial Interface connected to a UM7/UM7-LT orientation sensor. |
|---|
- Output data:
- Attitude and heading (Euler angles)
- Attitude quaternion
- magnetometer, accelerometer, gyro data
- GPS altitude, position, velocity (with optional external GPS)
- 3.3V TTL serial interface (UART) with baud rates up to 921,600bps can stream data or provide updates on request
- Note: the main UART pins, TX, and RX, are 5V-tolerant and can be directly connected to 5V systems that are guaranteed to read 3.3V as high
- Transmits data using human-readable NMEA strings (up to 100Hz broadcast), binary packets for higher efficiency (up to 255Hz broadcast), or a combination of both
- Flexible communication architecture allows UM7 to transmit any combination of data at individually adjustable rates
- Connects to the CHR Serial Interface software to allow for real-time plotting of sensor data, logging, device configuration, and magnetometer calibration
- SPI interface available through expansion connector
Specifications
- Dimensions: 1.06³—1.02³—0.26³ (27mm—26mm—6.5mm)
- Weight: 0.12oz (3.5g) without cable
- Operating voltage: 4V to 5.5V
- I/O logic level: 3.3V (with 5V-tolerant main UART pins, TX and RX)
Attitude and heading
- EKF estimation rate: 500Hz
- 1° typical static pitch/roll accuracy
- 3° typical dynamic pitch/roll accuracy
- 3° typical static yaw accuracy
- 5° typical dynamic yaw accuracy
- 0.5° angle repeatability
- 0.01° angular resolution
Videos
In this video playlist, Caleb Chamberlain from CH Robotics shows how to get started with the UM7, configure its communication settings, and calibrate its magnetometer.